

 Verlauf
Verlauf


Beispiele des Endergebnisses




Das 3D-Modell wird hierarchisiert, entsprechend den Bewegungsvorgaben, die ein humaner Character benötigt.

Nun werden IK-Chains in in die Arme des Characters integriert und Dummys als Animations-Helper eingebaut. Target-Objekte helfen, die Winkel der Armbeugen zu steuern.

Es werden IK-Chains in in die Beine des Characters integriert und Dummys als Animations-Helper eingebaut. Target-Objekte helfen, die Winkel der Kniebeugen zu steuern.
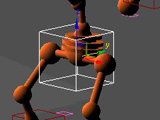
Es wird ein Position- und Orientation-Constraint in das System integriert, um diesen in der "Welt" zu fixieren. Das hilft, ein "Schmieren" des Characters am Boden zu verhindern und bewegt ihn rein durch die Positionierung der Füße.
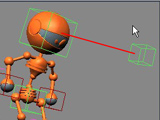
Es wird ein Look-At Helper eingebaut, um den Blick des Characters steuern zu können. Die Freiheitsgrade des Kopfes zum Neigen bleibt dennoch erhalten, um diese Geste für den Ausdruck des Characters zu wahren.

Es werden Footstep-Helper eingebaut. Mit ihnen können die Beine des Characters gesteuert werden. Sie dienen aber auch dazu, die Füße an vorgelegten Fußspuren zu orientieren. Somit ist das Rigging des Characters komplett.