

 Verlauf
Verlauf


 Alle Kapitel anzeigen
Alle Kapitel anzeigen
Für die Funktionsweise von 3D-Laserscannern ist das Zusammenwirken von Laser und Sensor die Basisvoraussetzung. Dabei wird ein vorgegebenes Zielobjekt, beispielsweise ein Auto, von einem Netz aus Laserimpulsen abgetastet, die vom Zielobjekt wieder zurück zum Sensor reflektiert und dort aufgezeichnet werden. Die einzelnen Punkte werden dabei über die Laufzeit des Signals und den Austrittswinkel des gesendeten Impulses berechnet. Dies führt zu einer Leistung von bis zu 6.000 Punkten pro Sekunde und einer Aufnahmezeit von wenigen Minuten. Die Genauigkeit der erhaltenen Daten liegt zwischen dem Millimeter- und Zentimeterbereich.
Ein Nachteil dieser Technologie ist, dass Laser und andere lichtbasierte Systeme durch verschiedene Oberflächeneigenschaften des Scanobjektes beeinflusst werden können. Dies können die Oberflächenfarbe, Transparenz oder reflektierende Teile sein. Im Laufe der Jahre wurde der Umgang mit diesem Problem aber immer mehr verbessert und verschiedene Work-Arounds haben sich dazu entwickelt.
Bei der Verwendung von Laserscannern müssen Sicherheitsvorkehrungen getroffen werden, um bei der Abtastung keine Schäden zu verursachen. Dies betrifft vor allem Scanvorgänge am menschlichen Körper. Obwohl die meisten Laser, die für Abtastung verwendet werden, unterhalb der Schädlichkeitsgrenze liegen, können Reflexionen dieser Strahlen wiederum schädliche Lichtstrahlen erzeugen.
Laserscanner lassen sich in mehrere Bereiche einteilen. Diese Bereiche beziehen sich vor allem auf die unterschiedlichen Arten wie Laserlicht gebündelt werden kann und wie durch Aussenden von Laserstrahlen ein 3D-Objekt erzeugt werden kann. Im Folgenden werden die einzelnen Laserscanner aufgelistet und näher beschrieben.
3D-Laserscanner mit Laserline-Technologie
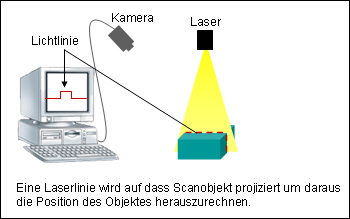
Diese Technologie wird häufig auch als Lichtschnittverfahren bezeichnet. Im Gegensatz zu punktbasierten 3D-Laserscannern wird hier eine Laserlinie auf das Scanobjekt projiziert. Daraus kann die Position des Objektes herausgerechnet und in einem Koordinatensystem ausgegeben werden.
Beim Scanvorgang werden eine Videokamera, ein Laserimpulsgeber, das zu scannende Objekt und ein Sensor benötigt. Die Videokamera wird in einem vorgegebenen Winkel zur Lichtquelle positioniert und bildet die das Objekt beleuchtende Lichtlinie ab. Durch diesen vorgegebenen Winkel kann die Position der Lichtlinie im 3D-Raum errechnet werden. Diese Lichtlinie entspricht einer „Scheibe“ des Objekts.
Um das gesamte Objekt abscannen zu können, muss das Objekt am Laser vorbeibewegt werden – so werden 3D-Darstellungen möglich. Bei dieser Bewegung über das Objekt werden laufend Bilder aufgenommen und ausgewertet. Dadurch kann aus den einzelnen aufgenommenen „Scheiben“ ein 3D-Objekt erzeugt werden. Die Messdaten dafür sind Messpunkte die jeweils eine X, Y und Z Koordinate besitzen, also dreidimensional sind.
3D-Laserscanner mit Cross-Lines-Technologie
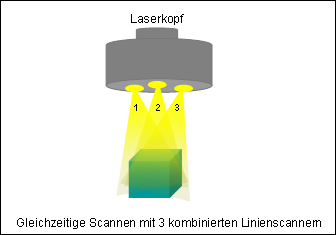
Dieser Scanner bietet selbst auf komplexen Objekten mit Oberflächenunebenheiten wie Bohrungen, Schlitzen oder Vertiefungen gute Scanergebnisse. Durch das gleichzeitige Scannen mit 3 kombinierten Linienscannern, die gleichzeitig um 120 Grad gedreht und geneigt werden können, können nahezu 20.000 Punkte pro Sekunde aufgenommen werden. Jede der 3 Kameras hat einen eigenen begrenzten Scanbereich und wechselt sich beim Scannen mit den anderen beiden Kameras in kurzen Zeitabständen ab.
Ein Vorteil gegenüber einzelner 3D-Linienscanner ist, dass bei komplexen Objekten (mit Erhöhungen und Vertiefungen) mindestens 3 Scanvorgänge notwendig wären um das Objekt dreidimensional zu erfassen. Mit einem Cross Lines 3D-Scanner genügt dafür ein einziger Scan. Darüber hinaus ist der Cross Lines 3D-Scanner flexibler und schneller beim Scanvorgang.
Ein anderer wichtiger Vorteil ist die bessere Auflösung der Scandaten, da der gesamte Gegenstand mit einer optimalen Dichte digitalisiert wird.
3D-Laserscanner mit Triangulations-Technologie
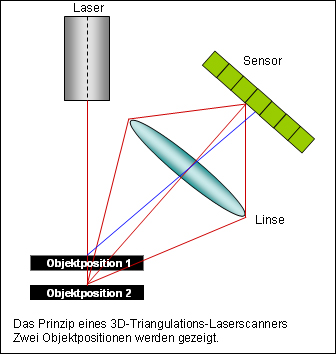
Der Triangulationslaser projiziert einen Laserstrahl auf ein Objekt und benutzt eine Kamera um nach der Position des Laserpunktes zu suchen. Abhängig davon, wo der Laser auf eine Oberfläche trifft, wird der Punkt unterschiedlich von der Kamera aufgefangen.
Diese Technik wird Triangulation genannt, weil die Geometrie des rechtwinkeligen Dreiecks das Messprinzip dafür darstellt. Dabei bilden ein Projektor, ein Punkt an der Oberfläche des bestrahlten Objekts und eine Kamera ein Dreieck. Projektor und Kamera sind die Basis des Dreiecks. Kennt man die Basisbreite und die Winkel zwischen den Lichtstrahlen und der Basis, ist es einfach den Ort des Schnittpunktes in Bezug zur Basis zu berechnen.
In den meisten Fällen wird mit einem Laser in Form einer Linie (im Gegensatz zu einem Laserpunkt) über das Objekt gefahren, um den Scannvorgang zu beschleunigen.
3D-Laserscanner mit Time-Of-Flight-Technologie
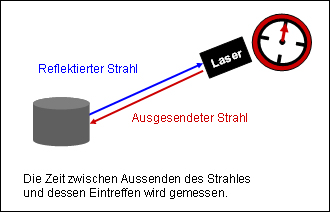
Das Herzstück dieses 3D-Scanners ist ein Entfernungsmesser. Dieser bestimmt den Abstand zu einer Oberfläche, indem er die Umlaufzeit eines Lichtimpulses misst. Dieser Impuls wird durch einen Laser ausgesandt und anschließend die Zeit bis zum Eintreffen des Lichts auf einem Detektor gemessen. Da die Lichtgeschwindigkeit c (~ 300.000 km/sec) bekannt ist, stellt die Umlaufzeit die Laufdistanz des Lichts dar, was zweimal der Abstand zwischen Scanner und gescannter Oberfläche ist. Wenn t die Umlaufzeit ist, dann ist der Abstand (c.t)/2.
Offenbar hängt die Genauigkeit eines Time-Of-Flight 3D-Sanners davon ab, wie genau die Zeit t gemessen werden kann. Der Entfernungsmesser ermittelt nur den Abstand zu einem Punkt von seiner Richtung aus. Um unterschiedliche Punkte scannen zu können, muss die Richtung des Entfernungsmessers geändert werden. Die Ausrichtung des Entfernungsmessers kann durch Drehen des Entfernungsmessers selbst oder durch die Verwendung von drehenden Spiegeln geändert werden. Die letzte Methode wird eher verwendet, weil Spiegel schneller in der Position verändert werden können.
Typische Time-Of-Flight Scanner können zwischen 10.000 ~ 100.000 Punkte pro Sekunde messen.
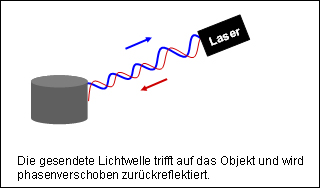
3D- Laserscanner mit Phase-Shift-Technologie
Beim Phase-Shift 3D-Laserverfahren wird der Abstand vom Aussenden des Laserimpulses bis zum Eintreffen der Reflektion des Strahles gemessen und dabei die Phasenverschiebung betrachtet.
Das Objekt steht während des Scans auf einer drehbaren Unterlage, die von einem Motor angetrieben wird. Die Auflösung der gewonnenen Daten hängt dabei von der Umdrehungsgeschwindigkeit des Motors ab, der diese Unterlage dreht. Der Laserstrahl ist konsistent auf das Objekt gerichtet und deswegen nicht für die Auflösung der gewonnenen Daten verantwortlich.
Mit der Phase-Shift-Technologie kann zusätzlich die Helligkeit der reflektierten Oberfläche erkannt werden. Dadurch wird ein graues Skalarbild erreicht, das mit einer "3D-Schwarzweißfotografie" vergleichbar ist. Das Hinzufügen von Farben nach Wahl ermöglicht, diese realistischer wirken zu lassen und einzelne Details hervorzuheben.
Der Hauptvorteil der Phase-Shift-Technologie ist die Geschwindigkeit der Punktsicherung: Mit 120.000 Punkten pro Sekunde ist dieses Verfahren bis zu 100mal schneller als die Time-Of-Flight Technologie.
Modulated Light 3D-Scanner bestrahlen das Scanobjekt mit sich ständig änderndem Licht. Üblicherweise kreist die Lichtquelle in unterschiedlichen Durchmessern, die sich in einem sinusförmigen Muster ändern. Eine Kamera ermittelt das reflektierte Licht und die Verschiebung des Musters. Dadurch wird der Abstand, in dem das Licht gewandert ist, festgestellt.
Das Wort „Structure“ in Structured Light leitet sich von der Technik, ein regelmäßiges Lichtmuster – eine Struktur – auf ein Objekt zu projizieren, ab. Das projizierte Lichtmuster kann ein- oder zweidimensional sein. Durch die Deformation des Lichtmusters am Objekt wird ein 3D-Modell errechnet.
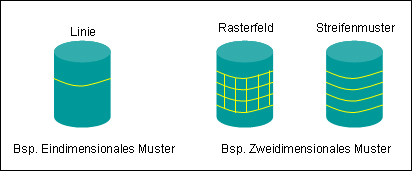
Ein Beispiel für ein eindimensionales Muster ist die Linie. Dazu muss der Laserstrahl, der ursprünglich einen Punkt darstellt, erst zu einer Linie geformt werden. Die Linie wird durch einen LCD-Projektor oder einen Laser auf das Objekt projiziert. Eine Kamera betrachtet die Linienform und verwendet eine Technologie ähnlich der Triangulation um die Distanz der einzelnen Punkte auf der Linie zu errechnen. Im Falle eines einspurigen Musters wird die Linie über das Objekt bewegt um Abstandsinformationen zu erhalten.
Ein Beispiel für ein zweidimensionales Muster ist ein Rasterfeld oder ein Streifenmuster. Die Kamera wird benutzt, um die Deformation des Musters zu betrachten und unter Verwendung eines komplexen Algorithmus wird der Abstand zwischen den Punkten im Muster errechnet.
Der Vorteil von Structured Light 3D-Scannern ist die Geschwindigkeit. Anstelle der Abtastung einzelner Punkte hintereinander tasten diese 3D-Scanner mehrere Punkte gleichzeitig ab oder fangen die Gesamtansicht des Objektes auf einmal ein.
Der Name "X-Ray" bedeutet frei übersetzt "Röntgenstrahlen" und bietet folgende Vorteile im Scanvorgang:
Manchmal werden mehr und detailliertere Daten gefordert, als von der Oberfläche eines Gegenstands erhalten werden können. Es kann beispielsweise notwendig sein, zu überprüfen ob ein Gegenstand mit einer komplexen inneren Struktur korrekt hergestellt wurde. Eine andere Herausforderung kann sein, Fossile im Inneren betrachten zu wollen ohne diese zu zerstören oder zu öffnen. Systeme die mit Licht oder Berührung arbeiten sind dafür nicht geeignet. Sie können eventuell Teile dieses Problems lösen, meist aber würde die Sammlung der Gesamtdaten die Zerstörung des Objekts mit sich bringen. In manchen Situationen ist dies kein Problem – anders ist dies allerdings bei wertvollen Gegenständen.
X-Ray 3D-Scanner können von Gegenständen Innenansichten eruieren. Sie arbeiten mit Röntgenstrahlen vergleichbar mit Röntgenstrahlen in der Medizin: Die Strahlen werden auf das zu scannende Objekt projiziert, um dadurch die resultierende Innenpunktdichte zu errechnen.
Diese beschriebenen Messinstrumente sind meist sehr groß und kostenintensiv. Darüber hinaus erfordern sie hohes fachkundiges Wissen, um die Technik adäquat anwenden zu können.

