

 Verlauf
Verlauf
VoodooDoll Geddan
 erstellt von: Tanja
erstellt von: Tanja

 Alle Kapitel anzeigen
Alle Kapitel anzeigen voriges Kapitel
voriges Kapitel
Technische Umsetzung Hardware und Software
Hardware
Anfangs hatte ich geplant, dass ich verschiedene Sensoren wie Neigungssensoren, Flex Sensoren und Drucksensoren mische um optimalen Output zu erhalten, aber da dies das ganze Projekt unnötig verkompliziert hätte sind es am Ende nur Drucksensoren geworden.
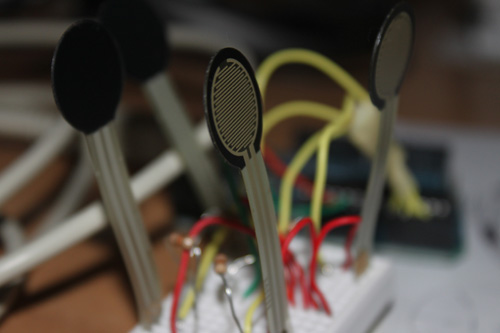
Dieser Drucksensor funktioniert mit einem druckempfindlichen Widerstand. Die Sensorfläche hat einen Durchmesser von ca. 15mm.
Der Widerstand ändert sich mit dem Druck auf die Sensorfläche. Je stärker der Druck, umso niedriger der Widerstand. Ohne Druck hat der Sensor einen Widerstand größer 1M Ohm. Die Sensorfläche kann mit einem Druck zwischen ca. 100g und 10kg belastet werden. Dieser Sensor ist ideal, um Druckunterschied auf einfache Weise zu messen. Für präzise Messungen ist er aber nicht geeignet.
Quelle Physical Computing
Mir war es dabei wichtig in etwa die Stärke der Kraftauswirkung zu messen, aber exakte Abmessungen war dabei nicht im Vordergrund, es ging mehr darum einen Unterschied zwischen keinen Druck und Variationen von Druck zu erkennen.
Weiters habe ich mich der Hilfe der Physical Computing Plattform Arduino zu Nutze gemacht. Das eine Ende des Sensors wurde mit 5 Volt verbunden und das andere mit Ground sowie auch mit einen Analog Input des Arduinos. Ich habe für die aktuelle Version der VoodooDoll Geddan vier Drucksensoren, ein Arduino uno und ein kleines Breadboard verwendet, wie man in Abb3.1 erkennen kann.
Software
Neben der eigenen Software des Arduino Boards habe ich auch Pure Data benutzt verwendet.
Eine Entwickleroberfläche, die visuelle Programmierung nutzt. So wie auch Arduino, wenn man von dem Anschaffungspreis des Boards absieht, handelt es sich bei Pure Data um Open Source.