

 Verlauf
Verlauf

 Alle Kapitel anzeigen
Alle Kapitel anzeigen
Kinematik [kinema, griech., Bewegung] ist die Lehre von der mathematischen Beschreibung der Bewegung von Punkten und Körpern im Raum. Sie untersucht den Verlauf einer Positionsänderung, ohne die Ursachen und Auswirkungen zu beachten. Kinematik in der 3D-Computergrafik ist eine Animationstechnik, die auf dem Hierachieverhalten von Gelenken und auf deren mathematischen Berechnungen basiert. Dieser Ansatz entstammt der Robotik. Hier wurden bereits sehr früh Methoden entwickelt, um eine exakte Positionierung von Roboterarmen zu kontrollieren. Die Basis einer Kinematik ist eine hierarchische Kette von Gelenken.
Bei hierarchisch verbundenen Gelenken sind zwei Bewegungsarten zu differenzieren:
- FK | Forward Kinematics | Vorwärtskinematik
- IK | Inverse Kinematics | Inverse Kinematik
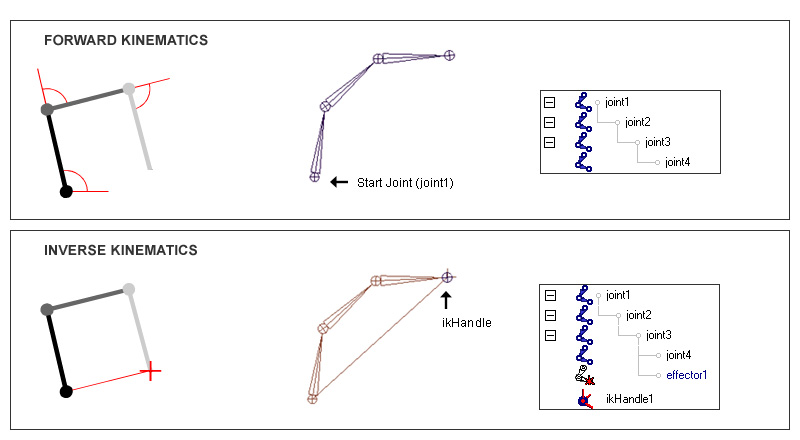
Vorwärtskinematik:
Die Winkelstellungen der Gelenke sind bekannt. Der aus den Winkeln resultierende Endpunkt ist unbekannt. Bei der Animation werden die Rotationswerte der einzelnen Gelenke animiert.
Die Inverse Kinematik:
Der gewünschte Endpunkt der Bewegung ist bekannt. Die Winkelstellungen werden berechnet. Eine IK-Animation wird durch ein IK-Steuerelement (IK-Handle bzw. Endeffector) kontroliert. Bei einer Animation werden ausschließlich Translationswerte für das IK-Steuerelement herangezogen.
Einsatzgebiete für IK oder FK in der Computeranimation:
- Bewegung von hierarischen Objekten bzw. roboterartigen Animationen (Bagger, Kräne, Roboterarme,.. )
- mechanische Objekte wie Kolben oder Lenkungen
- hüpfende Tischlampen (Luxor Junior), Scharniere, Schließmechanismen, ....
- komplexe hirarchische Objekte wie Ketten, Seile oder Schlangen
- Charakteranimation: Arme, Beine, Haare, Tentakel, ....; Skelette werden sowohl mit FK und IK animiert (siehe IK/FK-Blending)
