

 Verlauf
Verlauf

 Alle Kapitel anzeigen
Alle Kapitel anzeigen voriges Kapitel
voriges Kapitel
Grundlagen der Inversen Kinematik
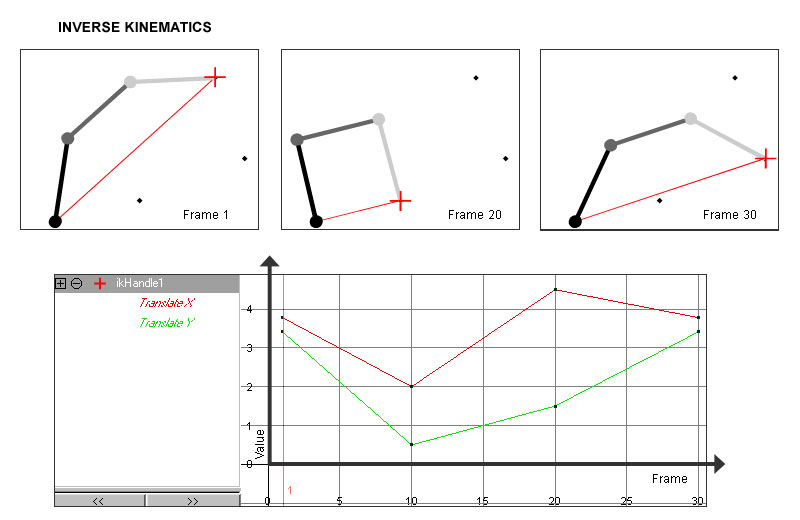
Bei der Inversen Kinematik wird eine Hierarchiekette mit einem IK-Steuerelement (IK-Handle bzw. Endeffector) kontrolliert. Die IK berechnet automatisch die Winkelstellungen der Gelenke.Je höher die Anzahl der Gelenke, desto komplexer die Berechnung und die Kontrolle für den Animator. Außerdem gibt es unendlich viele Möglichkeiten, die Winkelstellungen zu beschreiben. Nur wenige Lösungen sind für die Animation brauchbar. Die meisten Winkelkombinationen führen zu unbrauchbaren Lösungen. Zusätzliche Steuerungselemente wie Rotationsbeschränkungen und Ausrichtungsvektoren sind für die Kontrolle wichtig:
| Roboterarm-Animation mit IK: |
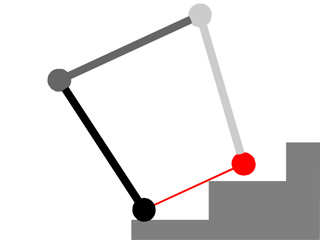 | Bei einer IK-Kette können IK-Kontroller und oder das Anfangselement animiert werden. Die dazwischenliegenden Ketten werden in der Regel nicht animiert. Bei einem gängigen Charaktersetup sind meist mehrere IK-Ketten (Arme und Beine) miteinander verknüpft. Die li. Abb. zeigt einen einfachen Charakter, bestehend aus einer IK-Kette, der Stiegen steigt. Hier werden ausschließlich IK-Kontroller (rot) und Anfangspunkt (schwarz) animiert. Die selbe Animation mit FK zu animieren wäre sehr zeitaufwendig und wenig intuitiv. |
