

 Verlauf
Verlauf

 Alle Kapitel anzeigen
Alle Kapitel anzeigen voriges Kapitel
voriges Kapitel
Grundlagen der Vorwärtskinematik
Das Animieren von komplexen Bewegungen wird durch hierarchisch verbundene Ketten vereinfacht. Bei der vorwärtsgerichteten Kinematik beeinflusst ein übergeordnetes Gelenk alle untergeordneten Gelenke. Dadurch lassen sich mehrere Gelenke gleichzeitig animieren. Um eine hierarchische Kette in eine Zielposition zu bringen, müssen die einzelnen Gelenke rotiert werden. Dabei beginnt der Animator mit dem ersten Gelenk und arbeitet sich durch die Hierarchiekette bis zum letzten Element.
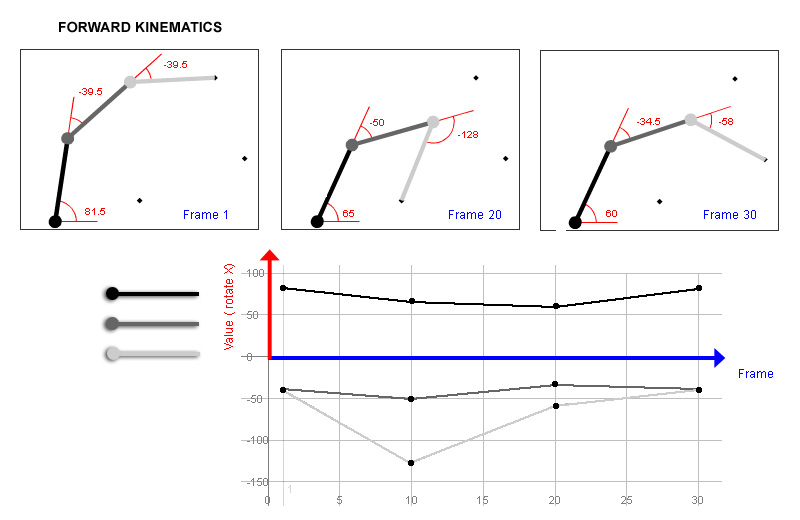
In diesem Beispiel wird ein Roboterarm mit 3 Gelenken mit FK animiert. Der Roboterarm muss in der Animation 3 Punkte ansteuern:
Der Animator rotiert alle Gelenke solange, bis der Roboterarm die gewünschte Endposition erreicht hat. Eine exakte Ansteuerung kann unter Umständen sehr zeitaufwendig sein. Sind die Rotationswerte ermittelt, werden zum jeweiligen Zeitpunkt Keyframes für die Rotationswerte gesetzt. In diesem Fall handelt es sich um eine 2D-Animation von 3 Gelenken: Es werden drei X-Rotationswerte animiert. Die Anzahl der zu animierenden Werte steigt mit der Anzahl der Gelenke. Bei einer sehr großen Anzahl von Gelenken ist eine inverse Kinematik zielführender, bei der nur ein IK- Steuerelement für die Animation herangezogen wird.
Beispiel: FK/Roboterarm | swf | 16 kb
