

 Verlauf
Verlauf

 Alle Kapitel anzeigen
Alle Kapitel anzeigen voriges Kapitel
voriges Kapitel
Steuerung der Winkelstellungen bei IK
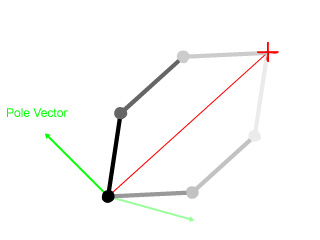
Bei einer IK-Kette sind die Winkelstellungen der einzelnen Glieder nicht eindeutig. Es entstehen mehrere Lösungen für die Konfiguration der Kette. Eine besondere Schwierigkeit bei der Berechnung von inverser Kinematik besteht darin, aus den vorhandenen Möglichkeiten die gewünschte Konfiguration zu finden. Vor allem dürfen die Konfigurationen der einzelnen Ketten bei der Animation nicht springen, sondern müssen flüssig ineinander übergehen. Meist definiert ein Vektor (Maya: Pole Vector ) die Ausrichtung. So ist z. B. bei einem Fuß oder Arm eine zusätzliche Kontrolle möglich. Durch weitere Einschränkungen wie z.B. Rotation Limits können die automatisch berechneten Werte besser gesteuert werden.
|
Abb. oben: | 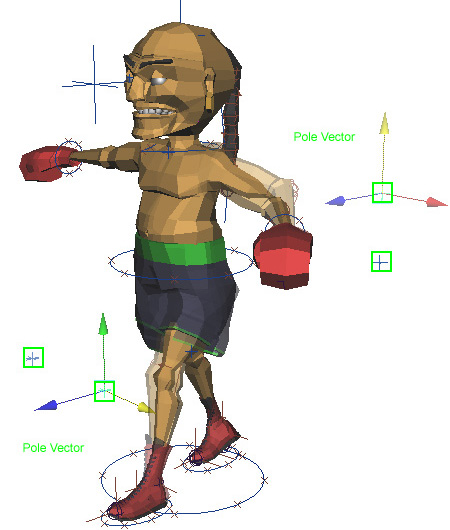 |
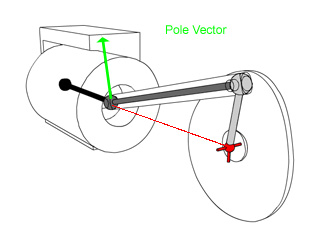 | Die li. Abb. zeigt einen Kolben, der mit einer IK-Kette animiert wird. In diesem Fall wird nicht die IK-Steuerung, sondern das erste Gelenk (schwarz) animiert. Das erste Gelenk bewegt sich entlang der x-Achse hin und her. Die Inverse Kinematik berechnet die Winkelstellung zwischen dem zweiten und dritten Gelenk. Da sich die Ausrichtung der Kette ändert, muss der Pole Vector in diesem Fall zusätzlich animiert werden. Beispiel: IK/Kolben mit animiertem Pole Vector | swf | 475 kb |
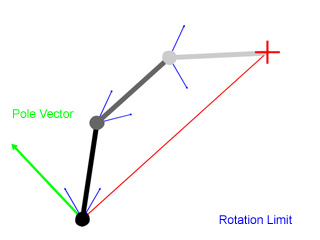 | Rotationseinschränkungen werden dazu verwendet, unerwünschte Winkelstellungen zu vermeiden. So dreht sich z. B. ein Scharniergelenk nur in einer Achse. Arme und Beine haben Rotationsgrenzen, die bei realistischen Animationen eingehalten werden müssen. Eine Rotationseinschränkung kann aber auch dazu führen, dass das gewünsche Endziel nicht erreicht wird. Bei den folgenden Beispielen werden div. Rotationseinschränkungen getestet. Beispiel: IK/Roboter mit einer Rotationseinschränkung| swf | 20 kb Bei dem Beispiel mit 3 Rotationseinschränkungen ist es unmöglich, den zweiten Punkt zu erreichen. Der IK-Kontroller bewegt sich zwar an die gewünschte Position, die Kette verharrt jedoch in der maximalen Stellung, bis sich der IK-Kontroller wieder innerhalb der Beschränkungen bewegt. |
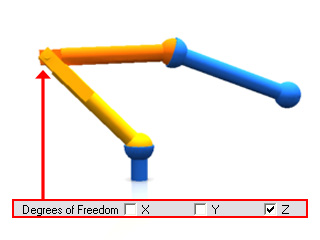 | Die Rotation kann gegebenenfalls auch auf Achsen eingeschränkt werden. So drehen sich z. B. diese Scharniergelenke nur auf einer Achse. Die Kugelgelenke sind durch weitere Limits so eingestellt, dass die Kugel in der Schale bleibt. Beispiel: IK/Roboter mit Rotationsachseneinschränkung | mov | 1.111 kb |
