

 Verlauf
Verlauf


Beispiele des Endergebnisses



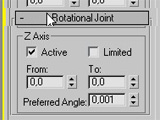
Die Objekte werden im Menü Hierarchie / IK mit ihren Rotational Joints beschränkt, indem nur die gewünschten Achsen aktiviert werden. Limits innerhalb der aktiven Rotationsachse ermöglichen es, die Körper ohne Überschneidungen später frei zu animieren.
Nun wird eine IK HI-Chain in das Systm eingfügt. Der Endpunkt dieser Kette ist frei bewegbar, der Roboterarm folgt jedoch nur soweit, wie es seine Beschränkungen zulassen. So kann man den Arm höchst effizient und einfach animieren.